GitHub项目传送门
欢迎Star
超参数调试处理(Tuning process)
目前已经讲到过的超参数中,重要程度依次是(仅供参考):
- 最重要:
- 学习率 $α$;
- 其次重要:
- $β$:动量衰减参数,常设置为 $0.9$;
- #hidden units:各隐藏层神经元个数;
- mini-batch 的大小;
- 再次重要:
- $β1$,$β2$,$ϵ$:Adam 优化算法的超参数,常设为 $0.9$、$0.999$、$10^{-8}$;
- #layers:神经网络层数;
- decay_rate:学习衰减率;
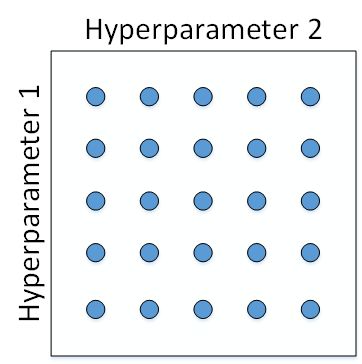
如何选择和调试超参数?传统的机器学习中,我们对每个参数等距离选取任意个数的点,然后,分别使用不同点对应的参数组合进行训练,最后根据验证集上的表现好坏,来选定最佳的参数。例如有两个待调试的参数,分别在每个参数上选取 5 个点,这样构成了 5x5=25 中参数组合,如下图所示:
但是在深度神经网络模型中,我们一般不采用这种均匀间隔取点的方法,比较好的做法是使用随机选择。对于上面这个例子,我们随机选择 25 个点,作为待调试的超参数,如下图所示:
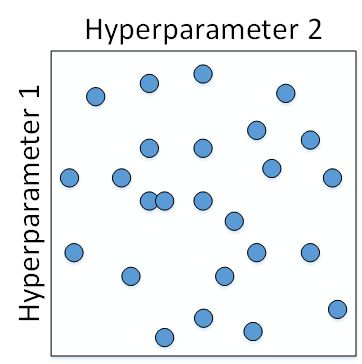
在实际应用中完全不知道哪个参数更加重要的情况下,随机采样的方式能有效解决这一问题,但是均匀采样做不到这点。
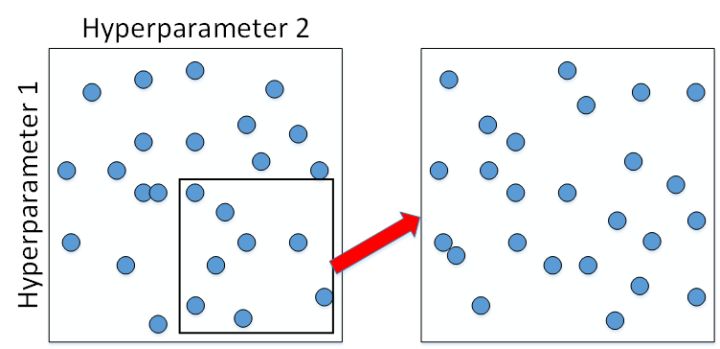
为了得到更精确的最佳参数,我们应该继续对选定的区域进行由粗到细的采样(coarse to fine sampling scheme)。也就是放大表现较好的区域,再对此区域做更密集的随机采样。例如,对下图中右下角的方形区域再做 25 点的随机采样,以获得最佳参数。
为超参数选择合适的范围(Using an appropriate scale to pick hyperparameters)
在超参数选择的时候,一些超参数是在一个范围内进行均匀随机取值,如隐藏层神经元结点的个数、隐藏层的层数等。但是有一些超参数的选择做均匀随机取值是不合适的,这里需要按照一定的比例在不同的小范围内进行均匀随机取值。
- 对于学习率 $α$,待调范围是$[0.0001, 1]$。如果使用均匀随机采样,那么有 90% 的采样点分布在$[0.1, 1]$之间,只有 10% 分布在$[0.0001, 0.1]$之间。这在实际应用中是不太好的,因为最佳的 $\alpha$ 值可能主要分布在$[0.0001, 0.1]$之间,而$[0.1, 1]$范围内 $\alpha$ 值效果并不好。因此我们更关注的是区间$[0.0001, 0.1]$,应该在这个区间内细分更多刻度。
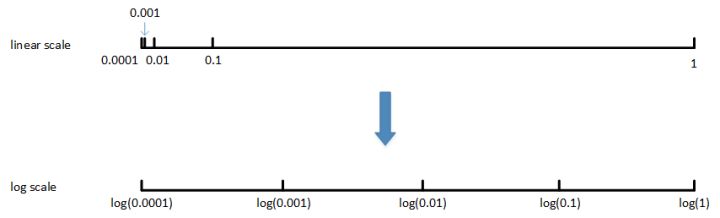
一般解法是,如果线性区间为$[a, b]$,令$m=log(a)$,$n=log(b)$,则对应的$log$区间为$[m,n]$。对$log$区间的$[m,n]$进行随机均匀采样,然后得到的采样值$r$,最后反推到线性区间,即 $10^r$ 。 $10^r$ 就是最终采样的超参数。
m = np.log10(a)
n = np.log10(b)
r = np.random.rand()
r = m + (n-m)*r
r = np.power(10,r)
-
对于 $β$,一般 $\beta$ 的取值范围在$[0.9, 0.999]$之间,那么 $1-\beta$ 的取值范围就在$[0.001, 0.1]$之间。那么直接对 $1-\beta$ 在$[0.001, 0.1]$区间内进行$log$变换即可。
- 至于为什么这么做:假设 $\beta$ 从 0.9000 变化为 0.9005 ,那么 $\frac{1}{1-\beta} $基本没有变化。但假设 $\beta$ 从 0.9990 变化为 0.9995 ,那么 $\frac{1}{1-\beta}$ 前后差别 1000。 $\beta$ 越接近 1 ,指数加权平均的个数越多,变化越大。所以对 $\beta$ 接近1的区间,应该采集得更密集一些。
超参数调试实践:Pandas vs. Caviar(Hyperparameters tuning in practice: Pandas vs. Caviar)
如何搜索参数的过程大概分两种重要的思想流派,或者说人们通常采用的两种重要但不同的方法。
- 根据你所拥有的计算资源来决定你训练模型的方式:
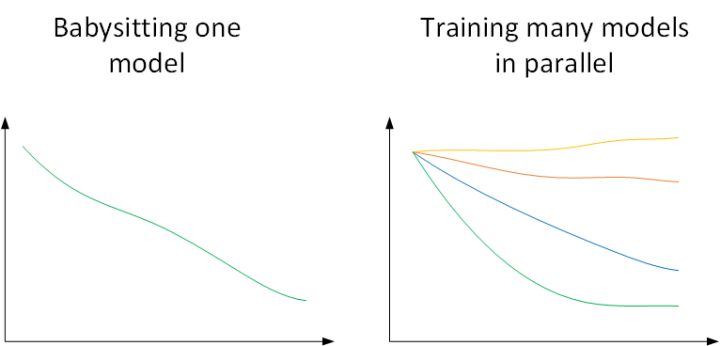
- Panda(熊猫方式):在在线广告设置或者在计算机视觉应用领域有大量的数据,但受计算能力所限,同时试验大量模型比较困难。可以采用这种方式:试验一个或一小批模型,初始化,试着让其工作运转,观察它的表现,不断调整参数;
- Caviar(鱼子酱方式):拥有足够的计算机去平行试验很多模型,尝试很多不同的超参数,选取效果最好的模型;
- 考虑到数据的变化或者服务器的变更等因素,建议每隔几个月至少一次,重新测试或评估超参数,来获得实时的最佳模型;
正则化网络中的激活函数(Normalizing activations in a network)
Batch 归一化 会使你的参数搜索问题变得很容易,使神经网络对超参数的选择更加稳定, 超参数范围会很庞大,工作效果也很好,也容易使你很容易地训练甚至是深层网络。
标准化输入可以提高训练的速度。方法是对训练数据集进行归一化的操作,即将原始数据减去其均值 $\mu$ 后,再除以其方差 $\sigma^2$ 。但是标准化输入只是对输入进行了处理,那么对于神经网络,又该如何对各隐藏层的输入进行标准化处理呢?
我们也可以用同样的思路处理隐藏层的激活值 $a[l]$,以加速 $W[l+1]$和 $b[l+1]$的训练。在实践中,经常选择标准化 $Z[l]$:
其中,$m$ 是单个 mini-batch 所包含的样本个数,$ϵ$ 是为了防止分母为零,通常取 $10^{-8}$
这样,我们使得所有的输入 $z^{(i)}$均值为 0,方差为 1。但我们不想让隐藏层单元总是含有平均值 0 和方差 1,也许隐藏层单元有了不同的分布会更有意义。因此,我们计算
其中,$γ $和 $β$ 都是模型的学习参数,所以可以用各种梯度下降算法来更新 $γ$ 和 $β$ 的值,如同更新神经网络的权重一样。
通过对 $γ$ 和 $β$ 的合理设置,可以让 $\tilde z^{(i)}$ 的均值和方差为任意值。这样,我们对隐藏层的 $z^{(i)}$进行标准化处理,用得到的 $\tilde z^{(i)}$替代 $z^{(i)}$。
设置 $γ$ 和 $β$ 的原因 是:如果各隐藏层的输入均值在靠近 0 的区域,即处于激活函数的线性区域,不利于训练非线性神经网络,从而得到效果较差的模型。因此,需要用 $γ$ 和 $β$ 对标准化后的结果做进一步处理。
在神经网络中融入Batch Norm(Fitting Batch Norm into a neural network)
对于 $L$层神经网络,经过 Batch Normalization 的作用,整体流程如下:

值得注意的是,因为Batch Norm对各隐藏层 $Z^{[l]}=W^{[l]}A^{[l-1]}+b^{[l]}$ 有去均值的操作,所以这里的常数项 $b^{[l]}$ 可以消去,其数值效果完全可以由 $\tilde Z^{[l]}$ 中的 $\beta$ 来实现。因此,我们在使用Batch Norm的时候,可以忽略各隐藏层的常数项$ b^{[l]}$ 。在使用梯度下降算法时,分别对$ W^{[l]}$, $\beta^{[l]}$ 和 $\gamma^{[l]}$ 进行迭代更新。
除了传统的梯度下降算法之外,还可以使用我们之前介绍过的动量梯度下降、RMSprop或者Adam等优化算法。
Batch Norm 起作用的原因(Why does Batch Norm work?)
Batch Normalization 效果很好的原因有以下两点:
- 通过对隐藏层各神经元的输入做类似的标准化处理,提高神经网络训练速度;
- 可以使前面层的权重变化对后面层造成的影响减小,即前面的$W$的变化对后面$W$造成的影响很小,整体网络更加健壮。
关于第二点,如果实际应用样本和训练样本的数据分布不同(如下图所示,提供的所有猫的训练样本都是黑猫,但是测试样本里却是什么颜色的猫都有,模型测试的结果有可能不尽人意)。
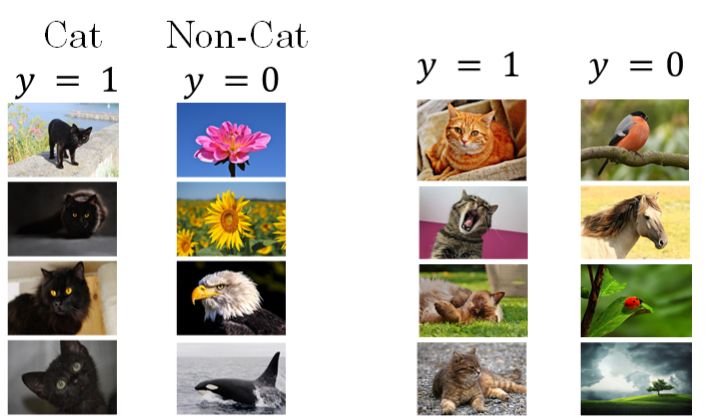
我们称发生了“Covariate Shift”。这种情况下,一般要对模型进行重新训练。Batch Normalization 的作用就是减小 Covariate Shift 所带来的影响,让模型变得更加健壮,鲁棒性(Robustness)更强。
Batch Norm减少了各层 $W^{[l]}$ 、$B^{[l]}$ 之间的耦合性,让各层更加独立,实现自我训练学习的效果。也就是说,如果输入发生covariate shift,那么因为Batch Norm的作用,对个隐藏层输出 $Z^{[l]}$ 进行均值和方差的归一化处理, $W^{[l]}$ 和 $B^{[l]}$ 更加稳定,使得原来的模型(识别黑猫)也有不错的表现。针对上面这个黑猫的例子,如果我们使用深层神经网络,使用Batch Norm,那么该模型对花猫的识别能力(新能力)应该也是不错的。
另外,Batch Normalization 也 起到微弱的正则化(regularization)效果。因为在每个 mini-batch 而非整个数据集上计算均值和方差,只由这一小部分数据估计得出的均值和方差会有一些噪声,因此最终计算出的 $\tilde z^{(i)}$也有一定噪声。类似于 dropout,这种噪声会使得神经元不会再特别依赖于任何一个输入特征。
最后,不要将 Batch Normalization 作为正则化的手段,而是当作加速学习的方式。正则化只是一种非期望的副作用,Batch Normalization 解决的还是反向传播过程中的梯度问题(梯度消失和爆炸)。
在测试数据上使用 Batch Norm(Batch Norm at test time)
训练过程中,Batch Norm是对单个mini-batch进行操作的,但在测试过程中,如果是单个样本,该如何使用Batch Norm进行处理呢?
首先,回顾一下训练过程中Batch Norm的主要过程:
其中, $\mu$ 和 $\sigma^2$ 是对单个mini-batch中所有$m$个样本求得的。在测试过程中,如果只有一个样本,求其均值和方差是没有意义的,就需要对 $\mu$ 和 $\sigma^2$ 进行估计。这个时候一般使用指数加权平均(exponentially weighted average)的方法来预测测试过程中单个样本的$\mu$ 和 $\sigma^2$
指数加权平均的做法很简单,对于第 $l$ 层隐藏层,考虑所有mini-batch在该隐藏层下的 $\mu^{[l]} $和 $\sigma^{2[l]}$ ,然后用指数加权平均的方式来预测得到当前单个样本的 $\mu^{[l]}$ 和 $\sigma^{2[l]}$ 。这样就实现了对测试过程单个样本的均值和方差估计。最后,再利用训练过程得到的 $\gamma$ 和 $\beta$ 值计算出各层的 $\tilde z^{(i)}$ 值。
Softmax 回归(Softmax Regression)
目前为止,介绍的分类例子都是二分类问题:神经网络输出层只有一个神经元,表示预测输出 $\hat y$是正类的概率 $ P(y = 1|x) $ ,$\hat y > 0.5$ 则判断为正类,反之判断为负类。
对于 多分类问题 ,用 C 表示种类个数,则神经网络输出层,也就是第 L 层的单元数量 $ n^{[L]} = C $ 。每个神经元的输出依次对应属于该类的概率,即 $ P(y = c|x), c = 0, 1, .., C-1 $ 。有一种 Logistic 回归的一般形式,叫做 Softmax 回归,可以处理多分类问题。
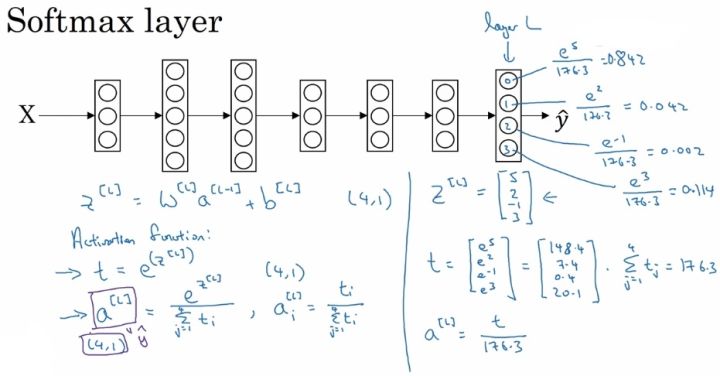
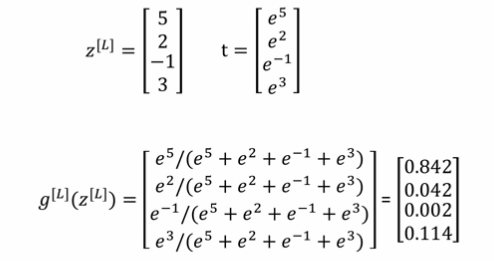
对于 Softmax 回归模型的输出层,即第 L 层,有:
$for\ \ i\ \ in\ \ range(L)$,有:
为输出层每个神经元的输出,对应属于该类的概率,满足:
所有的 $a^{[L]}_i$ ,即 $\hat y$ ,维度为(C, 1)。
训练 Sotfmax 分类器(Training a softmax classifier)
一个直观的例子:
损失函数和成本函数:
定义 损失函数 为:
当 i 为样本真实类别,则有:
因此,损失函数可以简化为:
所有 m 个样本的成本函数为:
所以为了最小化Loss function,我们的目标就变成了使得 $\hat y_{j}$ 的概率尽可能的大。
也就是说,这里的损失函数的作用就是找到你训练集中的真实的类别,然后使得该类别相应的概率尽可能地高,这其实是最大似然估计的一种形式。
多分类的 Softmax 回归模型与二分类的 Logistic 回归模型只有输出层上有一点区别。经过不太一样的推导过程,仍有
反向传播过程的其他步骤也和 Logistic 回归的一致。
本作品采用知识共享署名-相同方式共享 4.0 国际许可协议进行许可。欢迎转载,并请注明来自:黄钢的博客 ,同时保持文章内容的完整和以上声明信息!