GitHub项目传送门
欢迎Star
Mini-batch梯度下降(Mini-batch gradient descent)
batch 梯度下降法(批梯度下降法,我们之前一直使用的梯度下降法)是最常用的梯度下降形式,即同时处理整个训练集。其在更新参数时使用所有的样本来进行更新。
对整个训练集进行梯度下降法的时候,我们必须处理整个训练数据集,然后才能进行一步梯度下降,即每一步梯度下降法需要对整个训练集进行一次处理,如果训练数据集很大的时候,处理速度就会比较慢。
Mini-Batch 梯度下降法(小批量梯度下降法)每次同时处理单个的 mini-batch,其他与 batch 梯度下降法一致。
假设总的训练样本个数 m=5000000,其维度为 $(n_x,m)$ 。将其分成5000个子集,每个mini-batch含有1000个样本。我们将每个mini-batch记为 $X^{{t}}$ ,其维度为 $(n_x,1000)$ 。相应的每个mini-batch的输出记为 $Y^{{t}}$ ,其维度为 $(1,1000)$ ,且 $t=1,2,\cdots,5000$ 。
这里顺便总结一下我们遇到的神经网络中几类字母的上标含义:
- $X^{(i)}$ :第 $i$ 个样本
- $Z^{[l]}$ :神经网络第 $l$ 层网络的线性输出
- $X^{{t}},Y^{{t}}$ :第 $t$ 组 mini-batch
for t=1,…,T {
$\ \ \ \ Forward\ Propagation$
$\ \ \ \ Compute Cost Function$
$\ \ \ \ Backward Propagation$
$\ \ \ \ W:=W-\alpha\cdot dW$
$\ \ \ \ b:=b-\alpha\cdot db$
}
经过 $T$ 次循环之后,所有 $m$ 个训练样本都进行了梯度下降计算。这个过程,我们称之为经历了一个 epoch。对于 batch 梯度下降法来说,一个 epoch 只进行一次梯度下降算法;而 Mini-Batches 梯度下降法,一个epoch会进行 $T$ 次梯度下降算法。
batch 梯度下降法和 Mini-batch 梯度下降法代价函数的变化趋势如下,使用 batch 梯度下降法,成本是随着迭代次数不断减少的,而使用 Mini-Batches 梯度下降法,呈现震荡下降的趋势。
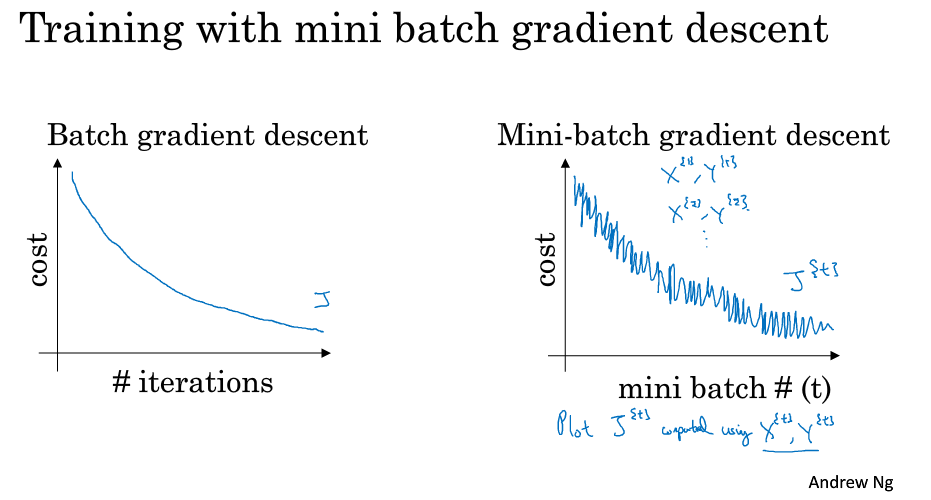
之所以出现细微振荡的原因是不同的mini-batch之间是有差异的。例如可能第一个子集 $(X^{{1}},Y^{{1}})$ 是好的子集,而第二个子集 $(X^{{2}},Y^{{2}})$ 包含了一些噪声 noise。出现细微振荡是正常的。
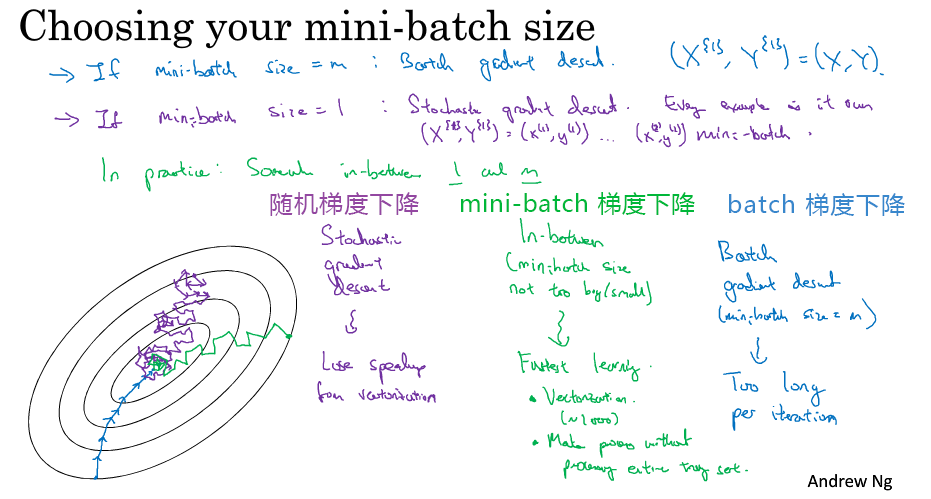
batch 的不同大小(size)带来的影响
- mini-batch 的大小为 1,即是 随机梯度下降法(stochastic gradient descent),每个样本都是独立的 mini-batch;
- 对每一个训练样本执行一次梯度下降,但是丢失了向量化带来的计算加速;
- Cost function总体的趋势向最小值的方向下降,但是无法到达全局最小值点,呈现波动的形式。
- mini-batch 的大小为 m(数据集大小),即是 batch 梯度下降法;
- 对所有m个训练样本执行一次梯度下降,每一次迭代时间较长;
- Cost function 总是向减小的方向下降
- Mini-batch梯度下降的大小为 $1 - m$ 之间:
- 可以实现快速学习,也应用了向量化带来的好处;
- 且 Cost function 的下降处于前两者之间。
决定的变量之一是 mini-batch 的大小(m 是训练集的大小)。
mini-batch 大小的选择:
- 如果训练样本的大小比较小,如 m ⩽ 2000 时,选择 batch 梯度下降法;
- 如果训练样本的大小比较大,选择 mini-batch 梯度下降法。为了和计算机的信息存储方式相适应,代码在 mini-batch 大小为 2 的幂次时运行要快一些。典型的大小为 $2^6$、$2^7$、…、$2^9$;
- mini-batch 的大小要符合 CPU/GPU 内存。
获得 mini-batch 的步骤
- 将数据集打乱;
- 按照既定的大小分割数据集;
其中打乱数据集的代码:
m = X.shape[1]
permutation = list(np.random.permutation(m))
shuffled_X = X[:, permutation]
shuffled_Y = Y[:, permutation].reshape((1,m))
指数加权平均(Exponentially weighted averages)
指数加权平均(Exponentially Weight Average) 是一种常用的序列数据处理方式,计算公式为:
其中 $Y_t$ 为 $t$ 下的实际值,$s_t$ 为 $t$ 下加权平均后的值,$β$ 为权重值。
指数加权平均数在统计学中被称为“指数加权移动平均值”。
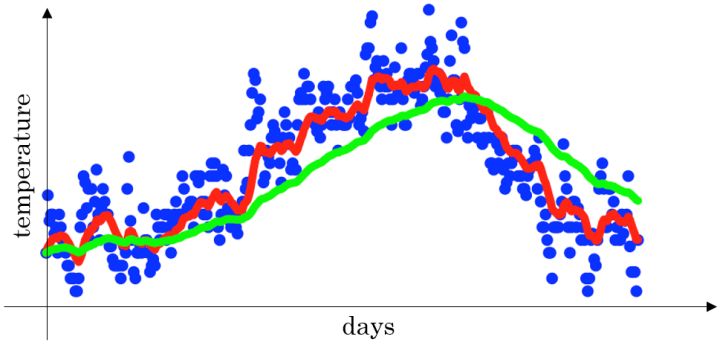
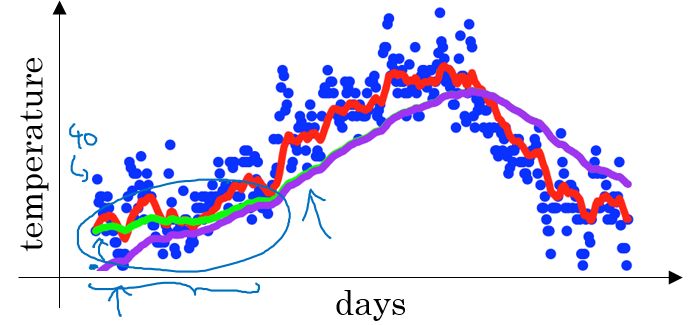
比如:给定一个时间序列,例如伦敦一年每天的气温值,图中蓝色的点代表真实数据,对于一个即时的气温值。
- 取权重值 $β = 0.9$ ,根据求得的值可以得到图中的红色曲线,它反映了气温变化的大致趋势。
- 当取权重值 $β=0.98$ 时,可以得到图中更为平滑的绿色曲线。
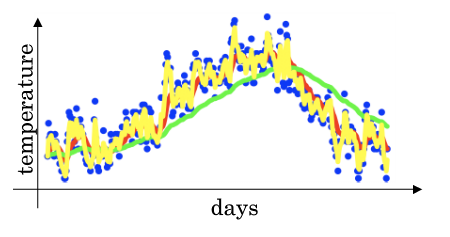
- 而当取权重值 $β=0.5$ 时,得到图中噪点更多的黄色曲线。
$β$ 越大相当于求取平均利用的天数越多,曲线自然就会越平滑而且越滞后。
理解指数加权平均(Understanding Exponentially weighted averages)
当 $β$ 为 0.9 时:
第1天的气温与第0天的气温有关:$v_{1} = 0.9v_{0} + 0.1\theta_{1}$ 第2天的气温与第1天的气温有关:$v_{2} = 0.9v_{1} + 0.1\theta_{2}$ 第3天的气温与第2天的气温有关:$v_{3} = 0.9v_{2} + 0.1\theta_{3}$ 以此类推:$…$ 第100天的气温与第99天的气温有关:$v_{100} = 0.9v_{99} + 0.1\theta_{100}$
展开:
其中 $θ_i$ 指第 $i$ 天的实际数据。所有 $θ$ 前面的系数(不包括 0.1,比如$\theta_{100}$的指数为 1 ,$\theta_{99}$的指数为 0.9……)相加起来为 1 或者接近于 1,这些系数被称作 偏差修正(Bias Correction)。
我们将指数加权平均公式的一般形式写下来:
观察上面这个式子, $\theta_t,\theta_{t-1},\theta_{t-2},\cdots,\theta_1$ 原始数据值, $(1-\beta)$,$(1-\beta)\beta$,$(1-\beta)\beta^2$,$\cdots$,$(1-\beta)\beta^{t-1}$ 是类似指数曲线,从右向左,呈指数下降的。 $V_t$ 的值就是这两个子式的点乘,将原始数据值与衰减指数点乘,相当于做了指数衰减,离得越近,影响越大,离得越远,影响越小,衰减越厉害。
根据函数极限的一条定理:
在我们的例子中,$1-\varepsilon=\beta=0.9$。
- 当 $β$ 为 0.9 时,$\frac{1}{1-\beta}=10$,可以当作把过去 10 天的气温指数加权平均作为当日的气温,第10天的气温指数已经下降到了当天的 1/3 左右,再往前数(过去第11天,12天,13……)气温指数就可以忽略了。
- 同理,当 $β$ 为 0.98 时,$\frac{1}{1-\beta}=50$,可以把过去 50 天的气温指数加权平均作为当日的气温。
因此,在计算当前时刻的平均值时,只需要前一天的平均值和当前时刻的值。
考虑到代码,只需要不断更新 $v$ 即可:
指数平均加权并 不是最精准 的计算平均数的方法,你可以直接计算过去 10 天或 50 天的平均值来得到更好的估计,但缺点是保存数据需要占用更多内存,执行更加复杂,计算成本更加高昂。
指数加权平均数公式的好处之一在于它只需要一行代码,且占用极少内存,因此 效率极高,且节省成本 。
指数加权平均的偏差修正(Bias correction in exponentially weighted averages)
在我们执行指数加权平均的公式时,当 $\beta=0.98$ 时,我们得到的并不是图中的绿色曲线,而是下图中的紫色曲线,其起点比较低。
原因是:
如果第一天的值为如 40 ,则 $v_{1}=0.02\times40=8$ ,得到的值要远小于实际值,因此,$v_1$ 仅为第一个数据的 0.02(或者说 $1-β$),后面几天的情况也会由于初值引起的影响,均低于实际均值。
因此,我们修改公式为
偏差修正得到了绿色的曲线,在开始的时候,能够得到比紫色曲线更好的计算平均的效果。随着 $t$ 逐渐增大, $\beta^{t}$ 接近于 0,所以后面绿色的曲线和紫色的曲线逐渐重合了。
momentum梯度下降(Gradient descent with momentum)
动量梯度下降(Gradient Descent with Momentum) 的基本思想就是计算梯度的指数加权平均数,并利用该梯度来更新权重。
在我们优化 Cost function 的时候,以下图所示的函数图为例:
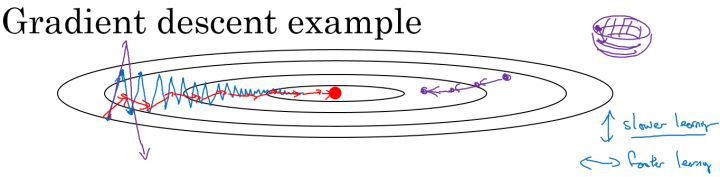
在利用梯度下降法来最小化该函数的时候,每一次迭代所更新的代价函数值如图中蓝色线所示在上下波动,而这种幅度比较大波动,减缓了梯度下降的速度,而且我们只能使用一个较小的学习率来进行迭代。
如果用较大的学习率,结果可能会如紫色线一样偏离函数的范围,所以为了避免这种情况,只能用较小的学习率。
但是我们又希望在如图的纵轴方向梯度下降的缓慢一些,不要有如此大的上下波动,在横轴方向梯度下降的快速一些,使得能够更快的到达最小值点,而这里用动量梯度下降法既可以实现,如红色线所示。
具体算法如下:
for l = 1, .. , L:
其中,将动量衰减参数 $β$ 设置为 0.9 是超参数的一个常见且效果不错的选择。当 $β$ 被设置为 0 时,显然就成了 batch 梯度下降法。
算法本质解释:
在对应上面的计算公式中,将Cost function想象为一个碗状,想象从顶部往下滚球,其中:
$dw$,$db$ 想象成球的加速度;而 $v_{dw}$、$v_{db}$ 相当于速度。
小球在向下滚动的过程中,因为加速度的存在速度会变快,但是由于 β 的存在,其值小于 1,可以认为是摩擦力,所以球不会无限加速下去。
RMSprop
RMSProp(Root Mean Square Prop,均方根) 算法是在对梯度进行指数加权平均的基础上,引入平方和平方根。每次迭代训练过程中,其权重W和常数项b的更新表达式为,具体过程为(省略了 $l$):
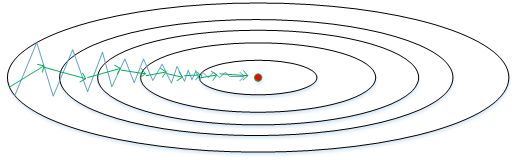
从图中可以看出,梯度下降(蓝色折线)在垂直方向($b$)上振荡较大,在水平方向($W$)上振荡较小,表示在b方向上梯度较大,即 $db$ 较大,而在W方向上梯度较小,即 $dW$ 较小。因此,上述表达式中 $S_b$ 较大,而 $S_W$ 较小。在更新W和b的表达式中,变化值 $\frac{dW}{\sqrt{S_W}}$ 较大,而 $\frac{db}{\sqrt{S_b}}$ 较小。也就使得W变化得多一些,$b$ 变化得少一些。即加快了 $W$ 方向的速度,减小了 $b$ 方向的速度,减小振荡,实现快速梯度下降算法,其梯度下降过程如绿色折线所示。总得来说,就是如果哪个方向振荡大,就减小该方向的更新速度,从而减小振荡。
还有一点需要注意的是为了避免RMSprop算法中分母为零,通常可以在分母增加一个极小的常数 $\varepsilon$ :
其中, $\varepsilon=10^{-8}$ ,或者其它较小值。
Adam优化算法(Adam optimization algorithm)
Adam (Adaptive Moment Estimation) 优化算法的基本思想就是将 Momentum 和 RMSprop 结合起来形成的一种适用于不同深度学习结构的优化算法,通常有超越二者单独时的效果。具体过程如下(省略了 $l$):
首先进行初始化:
- 用每一个 mini-batch 计算 $dW$、$db$,第 $t$ 次迭代时:
- 一般使用 Adam 算法时需要计算偏差修正:
- 所以,更新 $W$、$b$ 时有:
(可以看到 Andrew 在这里 $ϵ$ 没有写到平方根里去,和他在 RMSProp 中写的不太一样。考虑到 $ϵ$ 所起的作用,我感觉影响不大)
超参数的选择
Adam 优化算法有很多的超参数,其中
- 学习率 $α$:需要尝试一系列的值,来寻找比较合适的;
- $β_1$:常用的缺省值为 0.9;
- $β_2$:Adam 算法的作者建议为 0.999;
- $ϵ$:不重要,不会影响算法表现,Adam 算法的作者建议为 $10^{-8}$;
$β_1$、$β_2$、$ϵ$ 通常不需要调试。
学习率衰减(Learning rate decay)
如果设置一个固定的学习率 $α$,在最小值点附近,由于不同的 batch 中存在一定的噪声,因此不会精确收敛,而是始终在最小值周围一个较大的范围内波动。
而如果随着时间慢慢减少学习率 $α$ 的大小,在初期 $α$ 较大时,下降的步长较大,能以较快的速度进行梯度下降;而后期逐步减小 $α$ 的值,即减小步长,有助于算法的收敛,更容易接近最优解。
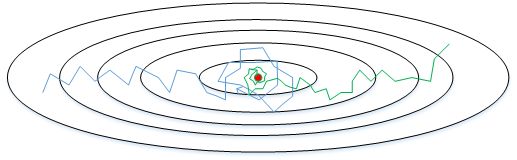
- 下图中,蓝色折线表示使用恒定的学习因子 $\alpha$ ,由于每次训练 $\alpha $相同,步进长度不变,在接近最优值处的振荡也大,在最优值附近较大范围内振荡,与最优值距离就比较远。
- 绿色折线表示使用不断减小的 $\alpha$ ,随着训练次数增加, $\alpha$ 逐渐减小,步进长度减小,使得能够在最优值处较小范围内微弱振荡,不断逼近最优值。
最常用的学习率衰减方法:
其中,decay_rate为衰减率(超参数),epoch_num为将所有的训练样本完整过一遍的次数。
- 指数衰减:
- 其他:
- 离散下降:
对于较小的模型,也有人会在训练时根据进度手动调小学习率。
局部最优问题(The problem of local optima)
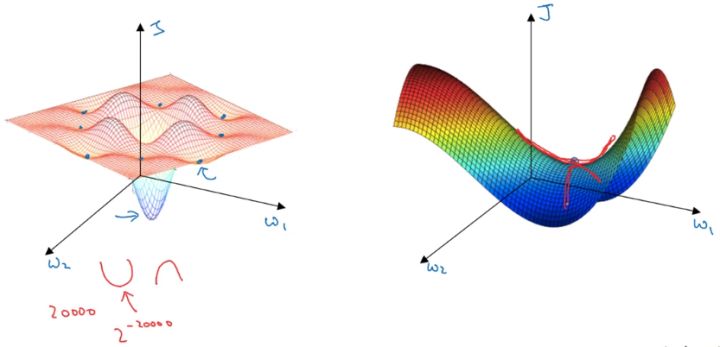
在低维度的情形下,我们可能会想象到一个Cost function 如左图所示,存在一些局部最小值点,在初始化参数的时候,如果初始值选取的不得当,会存在陷入局部最优点的可能性。
但是,如果我们建立一个高维度的神经网络。通常梯度为零的点,并不是如左图中的局部最优点,而是右图中的鞍点(叫鞍点是因为其形状像马鞍的形状), 鞍点(saddle) 是函数上的导数为零,但不是轴上局部极值的点。
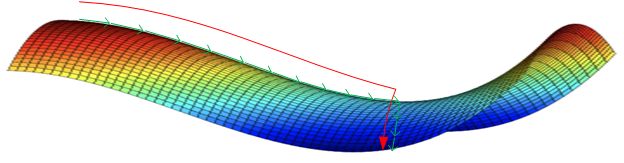
类似马鞍状的plateaus会降低神经网络学习速度。Plateaus是梯度接近于零的平缓区域,如下图所示。在plateaus上梯度很小,前进缓慢,到达鞍点需要很长时间。到达鞍点后,由于随机扰动,梯度一般能够沿着图中绿色箭头,离开鞍点,继续前进,只是在plateaus上花费了太多时间。
结论:
- 在训练较大的神经网络、存在大量参数,并且成本函数被定义在较高的维度空间时,困在极差的局部最优中是不大可能的;
- 鞍点附近的平稳段会使得学习非常缓慢,而这也是动量梯度下降法、RMSProp 以及 Adam 优化算法能够加速学习的原因,它们能帮助尽早走出平稳段。
本作品采用知识共享署名-相同方式共享 4.0 国际许可协议进行许可。欢迎转载,并请注明来自:黄钢的博客 ,同时保持文章内容的完整和以上声明信息!