GitHub项目传送门
欢迎Star
为什么要进行实例探究(Why look at case studies?)
计算机视觉研究中的大量研究都集中在如何把这些基本构件组合起来,形成有效的卷积神经网络。最直观的方式之一就是去看一些案例,就像很多人通过看别人的代码来学习编程一样,通过研究别人构建有效组件的案例是个不错的办法。实际上在计算机视觉任务中表现良好的神经网络框架往往也适用于其它任务。也就是说,如果有人已经训练或者计算出擅长识别猫、狗、人的神经网络或者神经网络框架,而你的计算机视觉识别任务是构建一个自动驾驶汽车,你完全可以借鉴别人的神经网络框架来解决自己的问题。
经典网络(Classic networks)
LeNet-5
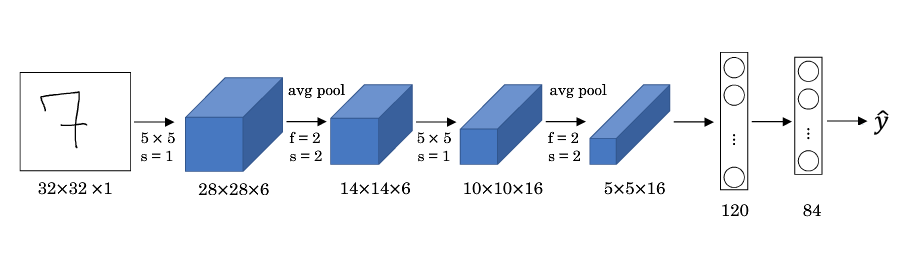
从左往右看,随着网络越来越深,图像的高度和宽度在缩小,从最初的 32×32 缩小到 28×28,再到 14×14、10×10,最后只有 5×5。与此同时,随着网络层次的加深,通道数量一直在增加,从 1 增加到 6 个,再到 16 个。
在过去,人们使用sigmoid函数和tanh函数,而不是ReLu函数,这篇论文正是使用了sigmoid函数和tanh函数,这种网络结构特别之处在于,各网络层之间是有关联的。比如,一个$n_H \times n_W \times n_C$ ,有$n_C$个通道,使用尺寸$f \times f \times n_C$的过滤器,每个过滤器的通道数和它上一层相同。
相关论文:LeCun et.al., 1998. Gradient-based learning applied to document recognition在阅读这篇论文的时候,建议阅读第二段,重点介绍了网络的结构,泛读第三段,介绍了有趣的实验结果。
特点:
- LeNet-5 针对灰度图像而训练,因此输入图片的通道数为 1。
- 该模型总共包含了约 6 万个参数,远少于标准神经网络所需。
- 典型的 LeNet-5 结构包含卷积层(CONV layer),池化层(POOL layer)和全连接层(FC layer),排列顺序一般为 CONV layer->POOL layer->CONV layer->POOL layer->FC layer->FC layer->OUTPUT layer。一个或多个卷积层后面跟着一个池化层的模式至今仍十分常用。
- 当 LeNet-5模型被提出时,其池化层使用的是平均池化,而且各层激活函数一般选用 Sigmoid 和 tanh。现在,我们可以根据需要,做出改进,使用最大池化并选用 ReLU 作为激活函数。
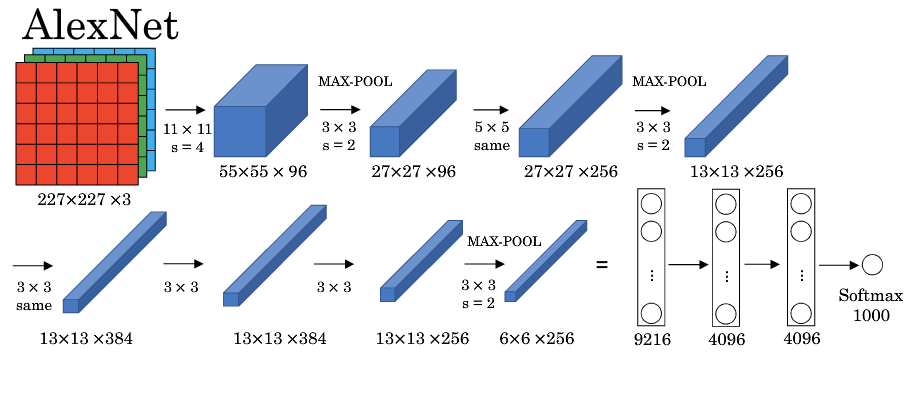
AlexNet
特点:
- AlexNet 模型与 LeNet-5 模型类似,但是更复杂,包含约 6000 万个参数。另外,AlexNet 模型使用了 ReLU 函数。
- 当用于训练图像和数据集时,AlexNet 能够处理非常相似的基本构造模块,这些模块往往包含大量的隐藏单元或数据。
相关论文:Krizhevsky et al.,2012. ImageNet classification with deep convolutional neural networks。这是一篇易于理解并且影响巨大的论文,计算机视觉群体自此开始重视深度学习。
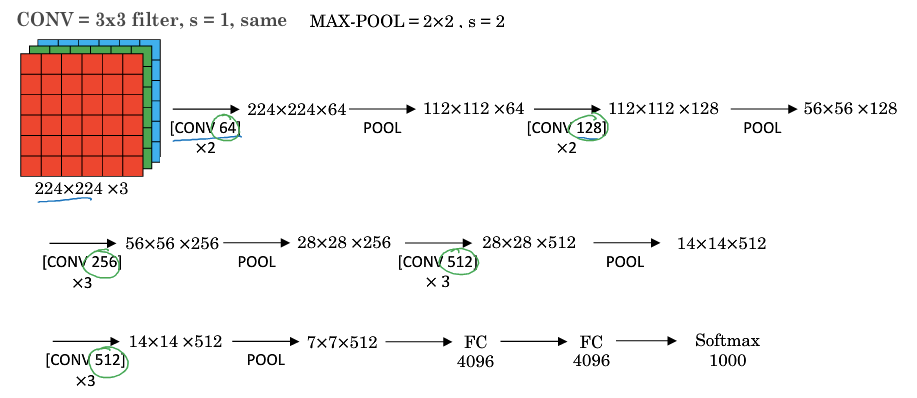
VGG
特点:
- VGG 又称 VGG-16 网络,“16”指网络中包含 16 个卷积层和全连接层。
- 超参数较少,只需要专注于构建卷积层。
- 结构不复杂且规整,都是几个卷积层后面跟着可以压缩图像大小的池化层,池化层缩小图像的高度和宽度。同时,卷积层的过滤器数量变化存在一定的规律,由 64 翻倍变成 128,再到 256 和 512。
- 主要缺点是VGG 需要训练的特征数量巨大,包含多达约 1.38 亿个参数。
相关论文:Simonvan & Zisserman 2015. Very deep convolutional networks for large-scale image recognition。
建议从介绍 AlexNet 的论文开始,然后就是 VGG 的论文,最后是 LeNet 的论文。
残差网络(Residual Networks(ResNets))
非常深的网络很难训练,存在着梯度消失和梯度爆炸的问题,但是通过跳跃连接(Skip connection),可以从某一层网络层获取激活,然后迅速反馈给另外一层。
ResNet是由残差块(Residual block)构成:
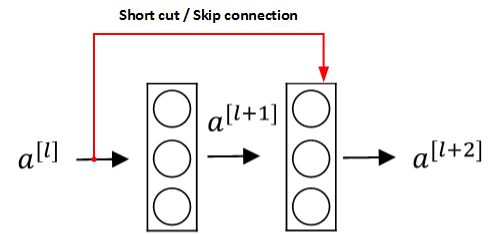
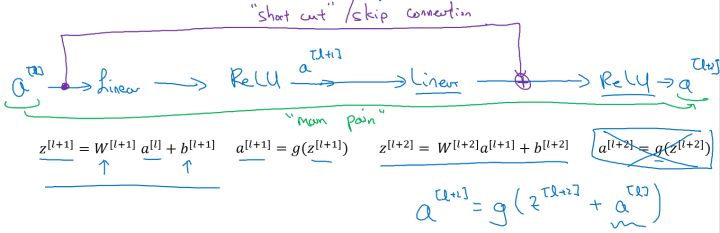
残差块(Residual block)。通过捷径(Short cut,或者称跳远连接,Skip connections)可以将 $a^{[l]}$添加到第二个 ReLU 过程中,直接建立 $a^{[l]}$与 $a^{[l+2]}$之间的隔层联系。表达式如下:
-
Linear:$z^{[l+1]} = W^{[l+1]}a^{[l]} + b^{[l+1]}$
-
Relu:$a^{[l+1]} = g(z^{[l+1]})$
-
Linear:$z^{[l+2]} = W^{[l+2]}a^{[l+1]} + b^{[l+2]}$
-
Relu:$a^{[l+2]} = g(z^{[l+2]} + a^{[l]})$
构建一个残差网络就是将许多残差块堆积在一起,形成一个深度网络。

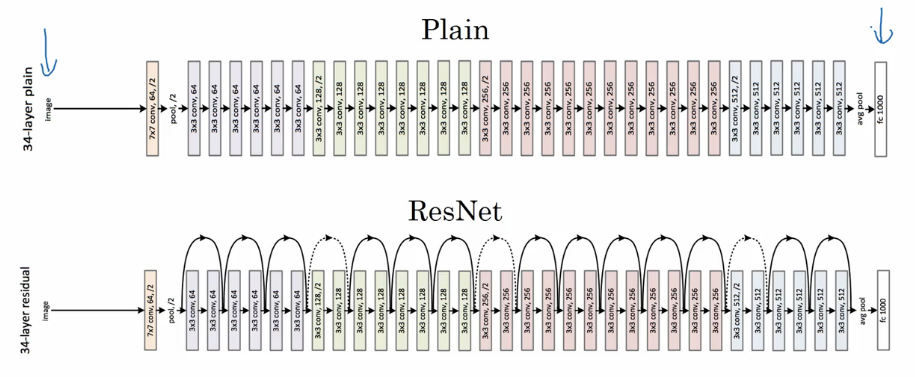
为了便于区分,在 ResNets 的论文He et al., 2015. Deep residual networks for image recognition中,非残差网络被称为普通网络(Plain Network)。将它变为残差网络的方法是加上所有的跳远连接。

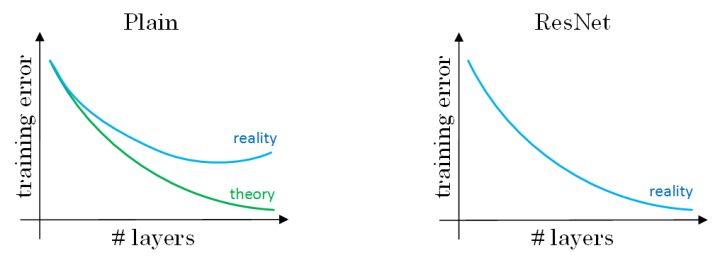
如果使用标准优化算法训练一个普通网络,比如说梯度下降法,或者其它热门的优化算法。如果没有残差,没有这些捷径或者跳跃连接,会发现随着网络深度的加深,训练错误会先减少,然后增多。但有了 ResNets 就不一样了,即使网络再深,训练的表现却不错,比如说训练误差减少,就算是训练深达 100 层的网络也不例外。
为什么残差有用?(Why ResNets work?)
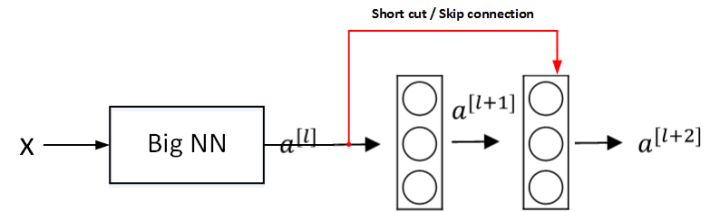
假设有一个大型神经网络,其输入为 $X$,输出为 $a^{[l]}$。给这个神经网络额外增加两层,输出为 $a^{[l+2]}$。将这两层看作一个具有跳远连接的残差块。为了方便说明,假设整个网络中都选用 ReLU 作为激活函数,包括输入 X 的非零异常值,因此输出的所有激活值都大于等于 0。
则有
当发生梯度消失时,$W^{[l+2]}\approx0$,$b^{[l+2]}\approx0$,则有:
所以给大型神经网络增加两层,不论是把残差块添加到神经网络的中间还是末端位置,都不会影响网络的表现,残差网络起作用的主要原因就是这些残差块学习恒等函数非常容易,你能确定网络性能不会受到影响,很多时候甚至可以提高效率,或者说至少不会降低网络的效率,因此创建类似残差网络可以提升网络性能。
通过使用same卷积,使得$z^{[l+2]}$和$a^{[l]}$具有相同的维度。但如果两者维度不一样,则需要额外引入矩阵 $W_s$与 $a^{[l]}$相乘,使得二者的维度相匹配。参数矩阵 $W_s$既可以通过模型训练得到,也可以作为固定值。
下图展示了通过添加跳跃连接来将普通网络转化为残差网络。这个网络有很多层 3×3 卷积,而且它们大多都是 same 卷积,这就是添加等维特征向量的原因。所以这些都是卷积层,而不是全连接层,因为它们是 same 卷积,维度得以保留,这也解释了添加项$z^{[l+2]}+a^{[l]}$(维度相同所以能够相加)
普通网络和 ResNets 网络常用的结构是:卷积层-卷积层-卷积层-池化层-卷积层-卷积层-卷积层-池化层……依此重复。直到最后,有一个通过 softmax 进行预测的全连接层。
网络中的网络以及1x1卷积(Network in Network and 1×1 convolutions)
1x1 卷积(1x1 convolution,或称为 Network in Network)指过滤器的尺寸为 1。当通道数为 1 时,1x1 卷积意味着卷积操作等同于乘积操作。
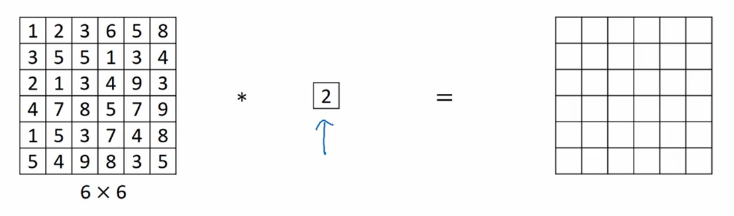
如果是一张 6×6×32 的图片,那么使用 1×1 过滤器进行卷积效果更好。具体来说,1×1 卷积所实现的功能是遍历这 36 个单元格,计算左图中 32 个数字(通道)和过滤器中 32 个数字(通道)的元素积之和,然后应用 ReLU 非线性函数。
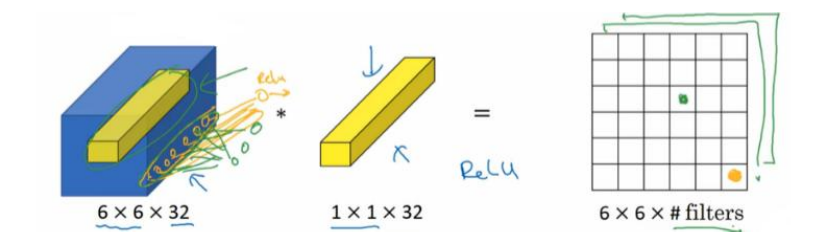
这个 1×1×32 过滤器中的 32 个数字可以这样理解,一个神经元的输入是 32 个数字(输入图片中左下角位置 32 个通道中的数字),即相同高度和宽度上某一切片上的 32 个数字,这 32 个数字具有不同通道,乘以 32 个权重(将过滤器中的 32 个数理解为权重),然后应用 ReLU 非线性函数,在这里输出相应的结果。
如果过滤器不止一个,而是多个(filters个),就好像有多个输入单元,输出结果是 6×6x#filters(过滤器数量)。
池化能压缩数据的高度($n_H$)及宽度($n_W$),而 1×1 卷积能压缩数据的通道数($n_C$)。在如下图所示的例子中,用 32 个大小为 1×1×192 的滤波器进行卷积,就能使原先数据包含的 192 个通道压缩为 32 个。
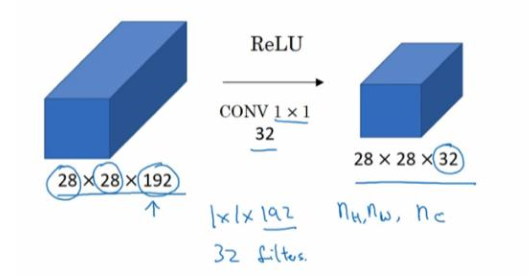
1×1 卷积层就是这样实现了一些重要功能的(doing something pretty non-trivial),它给神经网络添加了一个非线性函数,从而减少或保持输入层中的通道数量不变,也可以增加通道数量。这对构建 Inception 网络很有帮助。
虽然论文Lin et al., 2013. Network in network中关于架构的详细内容并没有得到广泛应用,但是 1x1 卷积的理念十分有影响力,许多神经网络架构(包括 Inception 网络)都受到它的影响。
谷歌Inception网络简介(Inception network motivation)
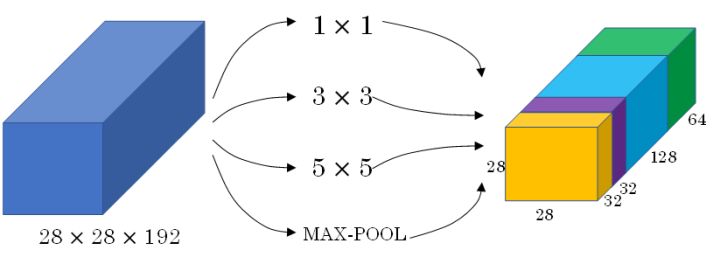
在之前的卷积网络中,我们只能选择单一尺寸和类型的滤波器。而 Inception 网络的作用 即是代替人工来确定卷积层中的过滤器尺寸与类型,或者确定是否需要创建卷积层或池化层。
基本思想是 Inception 网络不需要人为决定使用哪个过滤器或者是否需要池化,而是由网络自行确定这些参数,你可以给网络添加这些参数的所有可能值,然后把这些输出连接起来,让网络自己学习它需要什么样的参数,采用哪些过滤器组合。
不过为了确保输出的矩阵的高和宽一致,需要将输入层进行padding操作,完成same卷积。不过Inception层有一个计算成本很大的问题。
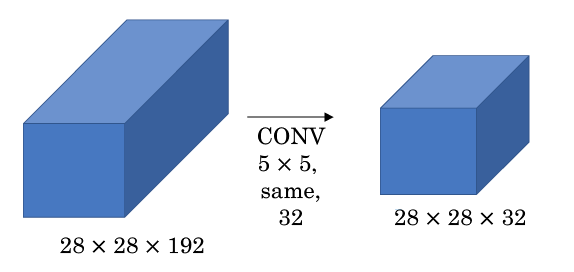
图中有 32 个滤波器,每个滤波器的大小为 5x5x192。输出大小为 28x28x32,所以需要计算 28x28x32 个数字,对于每个数,都要执行 5x5x192 次乘法运算。加法运算次数与乘法运算次数近似相等。因此,可以看作这一层的计算量为 28x28x32x5x5x192 = 1.2亿。
为了解决计算量大的问题,可以引入 1x1 卷积来减少其计算量。
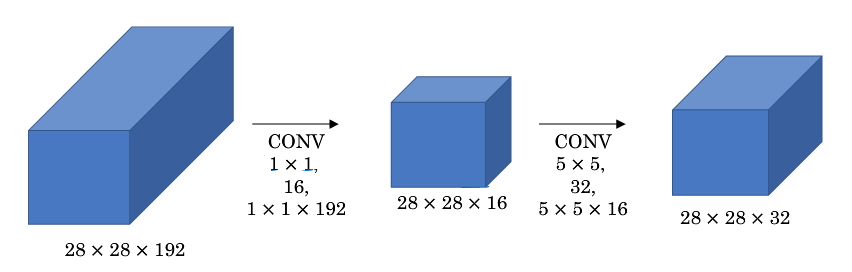
对于同一个例子,我们使用 1x1 卷积把输入数据从 192 个通道减少到 16 个通道,然后对这个较小层运行 5x5 卷积,得到最终输出。这个 1x1 的卷积层通常被称作 瓶颈层(Bottleneck layer) 。
改进后的计算量为 28x28x192x16 + 28x28x32x5x5x15 = 1.24 千万,减少了约 90%。
不想决定池化层是使用 1×1,3×3 还是 5×5 的过滤器,那么 inception 模块就是最好的选择。我们可以应用各种类型的过滤器,只需要把输出连接起来。之后我们讲到计算成本问题,我们学习了如何通过使用 1×1 卷积来构建瓶颈层,从而大大降低计算成本,
也就是说,要合理构建瓶颈层,就可以既显著缩小计算规模,又不会降低网络性能。
Inception网络(Inception network)
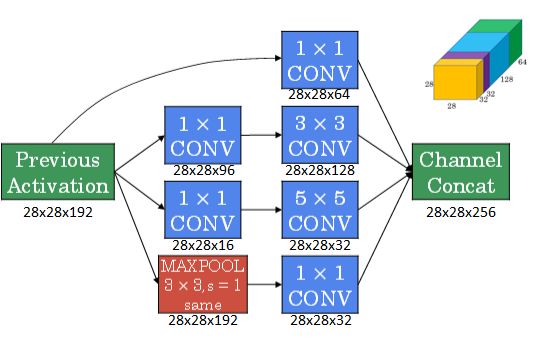
为了能在最后将这些输出都连接起来,我们会使用 same 类型的 padding 来池化,使得输出的高和宽依然是 28×28 ,将这些方块全都连接起来。在这过程中,把得到的各个层的通道都加起来,最后得到一个 28×28×256 的输出。通道连接实际就是之前视频中看到过的,把所有方块连接在一起的操作。这就是一个 Inception 模块,而 Inception 网络所做的就是将这些模块都组合到一起。
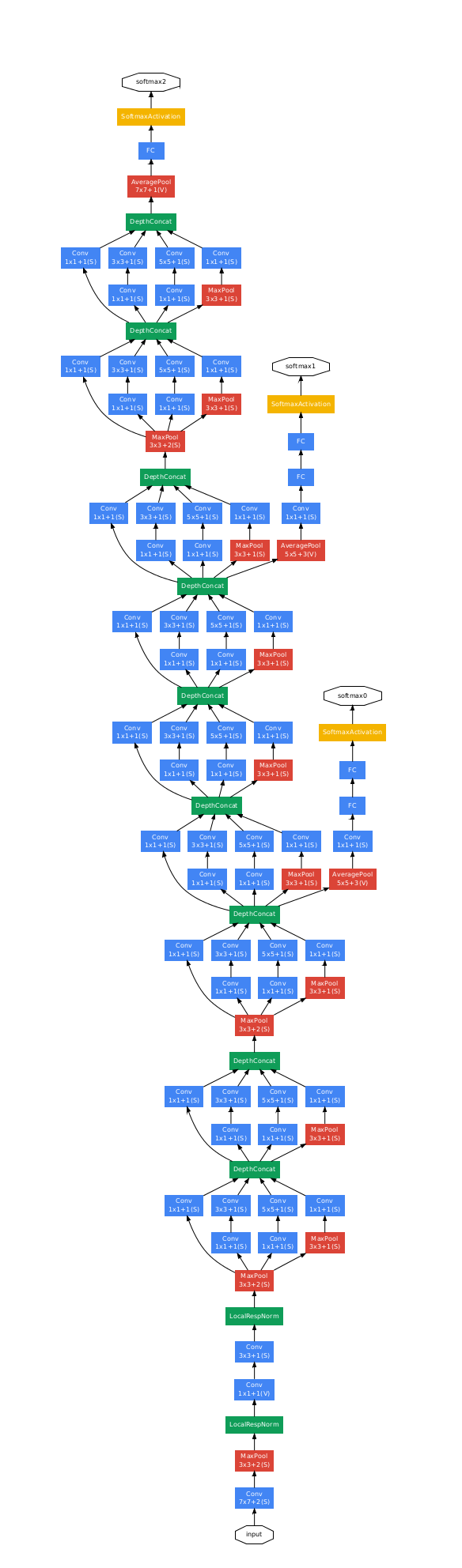
多个Inception 模块的堆叠构成Inception Network,下面是GoogleNet的结构:
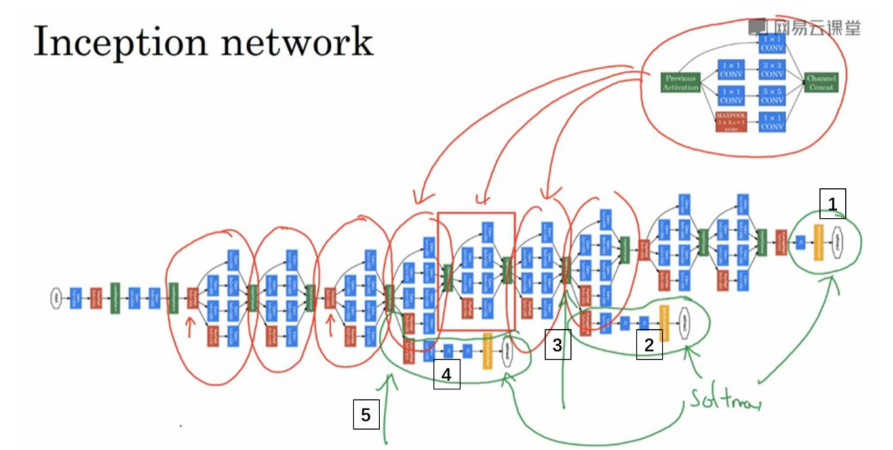
所以这些分支有什么用呢?在网络的最后几层,通常称为全连接层,在它之后是一个 softmax 层(编号 1)来做出预测,这些分支(编号 2)所做的就是通过隐藏层(编号 3)来做出预测,所以这其实是一个 softmax 输出(编号 2),这(编号 1)也是。这是另一条分支(编号 4),它也包含了一个隐藏层,通过一些全连接层,然后有一个 softmax 来预测,输出结果的标签。
注意绿色笔圈出的隐藏层,这些分支都是 Softmax 的输出层,可以用来参与特征的计算及结果预测,起到调整并防止发生过拟合的效果。
如果你理解了 Inception 模块,你就能理解 Inception 网络,无非是很多 个 Inception 模块一环接一环,最后组成了网络。
大图展示如下:
使用开源的实现方案(Using open-source implementations)
开发一个计算机视觉应用,一个常见的工作流程是,先选择一个喜欢的架构,或许是在这门课中学习到的,或者是你从朋友那听说的,或者是从文献中看到的,接着寻找一个开源实,从 GitHub 下载下来,以此基础开始构建。这样做的优点在于,这些网络通常都需要很长的时间来训练,而或许有人已经使用多个 GPU,通过庞大的数据集预先训练了这些网络,这样一来你就可以使用这些网络进行迁移学习。
迁移学习(Transfer Learning)
相比于从头训练权重,或者说从随机初始化权重开始,如果下载别人已经训练好网络结构的权重,通常能够进展的相当快,用这个作为预训练,然后转换到感兴趣的任务上,社区经常使用得数据集:比如 ImageNet,或者 MS COCO,或者 Pascal。
在我们自己的任务中,常常遇到的情况是,在做某类物体的识别分类时,面临着数据集不够的情况,这个时候通过应用迁移学习,应用社区研究者建立的模型和参数,用少量的数据仅训练最后的自定义的softmax网络,从而能够在小数据集上达到很好的效果。
不同的深度学习编程框架有不同的方式,允许你指定是否训练特定层的权重。在这个例子中,你只需要训练 Softmax 层的权重,把前面这些层的权重都冻结(而冻结的层由于不需要改变和训练,可以看作一个固定函数。可以将这个固定函数存入硬盘,以便后续使用,而不必每次再使用训练集进行训练了。)。
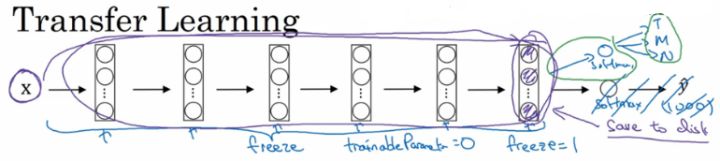
- 取输入图像 x,然后把它映射到这层(softmax的前一层,紫色线条标记的)的激活函数,计算特征或者激活值。
- 将这个固定函数存入硬盘(softmax 层之前的所有层视为一个固定映射)。
- 在此之上训练 softmax 分类器。
存储到硬盘或者说预计算方法的优点就是,你不需要每次遍历训练集再重新计算这个激活值了。
如果我们在自己的问题上也拥有大量的数据集,我们可以多训练后面的几层。总之随着数据集的增加,我们需要“(冻结) freeze”的层数越来越少。最后如果我们有十分庞大的数据集,那么我们可以训练网络模型的所有参数,将其他研究者训练的模型参数作为参数的初始化来替代随机初始化,来加速我们模型的训练。

数据扩充(Data augmentation)
计算机视觉领域的应用都需要大量的数据。当数据不够时,数据扩增(Data Augmentation) 就有帮助。常用的数据扩增包括:
- 镜像翻转;
- 随机裁剪;
- 色彩转换:给 R、G 和 B 三个通道上加上不同的失真值,改变图片色调。
- PCA 颜色增强 :指更有针对性地对图片的 RGB 通道进行主成分分析(Principles Components Analysis,PCA),对主要的通道颜色进行增加或减少,比如说,如果你的图片呈现紫色,即主要含有红色和蓝色,绿色很少,然后 PCA 颜色增强算法就会对红色和蓝色增减很多,绿色变化相对少一点,所以使总体的颜色保持一致。
计算机视觉现状(The state of computer vision)
大部分机器学习问题是介于少量数据和大量数据范围之间,也就是说,如何将少量数据训练的应用很好的运用到现实生活中去。
- 当你有很多数据时,人们倾向于使用更简单的算法和更少的手工工程,因为我们不需要为这个问题精心设计特征。
- 相反当你没有那么多的数据时,那时你会看到人们从事更多的是手工工程,低调点说就是你有很多小技巧可用。
通常我们的学习算法有两种知识来源:
- 被标记的数据,就像(x,y)应用在监督学习。
- 手工工程,有很多方法去建立一个手工工程系统,它可以是源于精心设计的特征,手工精心设计的网络体系结构或者是系统的其他组件。
当然,当数据量不够的时候,我们还有“迁移学习”这一个有效的办法。
另外,在模型研究或者竞赛方面,有一些方法能够有助于提升神经网络模型的性能:
- 集成(Ensembling):独立地训练几个神经网络,并平均它们的输出。假设你的 7 个神经网络,它们有 7 个不同的预测,然后平均他们,这可能会让你在基准上提高 1%,2%或者更好。
- Multi-crop at test time:将数据扩增应用到测试集,对结果进行平均。
但是由于这些方法计算和内存成本较大,一般不适用于构建实际的生产项目。
本作品采用知识共享署名-相同方式共享 4.0 国际许可协议进行许可。欢迎转载,并请注明来自:黄钢的博客 ,同时保持文章内容的完整和以上声明信息!